Welcome to Vision!
Vision is a University of Notre Dame Electrical Engineering Senior Design project. The goal of this project is to design a camera controlled system for Mechatronic Football.
EE Senior Design is a two semester sequence in which students work in teams to propose, design, build, and test a functional prototype of a product. In this case, our product is the first prototype camera controlled system that is meant to be used in conjuction with mechatronic football.
About Us

Vision is made up of five EE seniors: Lucas De La Fuente, Bryan Dimas, Nick Ferruolo, Ryan Hames, and Kevin Shetler. Mechatronic Football involves programming and designing robots to play a game of Football. The project has evolved over several years and now involves robots that can actually throw a football via a modified catapult and catch the football via a basket. The Vision project would add a camera system in order to track the robots and help the robots accurately throw the football to other robots.
The problem with Mechatronic Football is that throwing a football from robot to robot is extremely inaccurate and adds to a greater level of difficulty for the users to accomplish their goals, which is to score a touchdown. The current system is unable to accurately measure distance and needs a better system in order to measure distance between players in order to accurately deliver a ball.
Proposed Solution
Create a camera-controlled system that is able to accurately measure distance between robot players (offense and defense) and relay this information back to the robots and users in order to make a decision. This camera-controlled system would ideally be placed above the playing field in order to view all the players and not interfere with play.
Vision Features
Parts and Features Overview
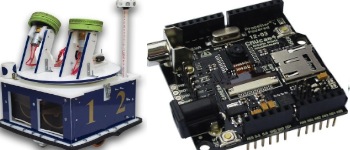
CMUCam4, PIC32 Microchip, FPGA, and Packet Sender
The Vision system was designed to interface the CMUCam 4, which is a fully programmable embedded computer vision sensor, to a PIC32 Microchip. The CMUCam4 would send a bitmap to the PIC32 microchip which would then send the information to a DE1 FPGA. Then FPGA would contain all the programming necessary to process the bitmap information in order to get position based on color, color tracking, and prediction of position. The FPGA would then send the information back to the PIC32 microchip, which would then send it to a packet sender, which will send the information to the robots.
Our Gallery
 CMUcam4
CMUcam4 Vision Board
Vision Board PIC32MX695F512H Microchip
PIC32MX695F512H Microchip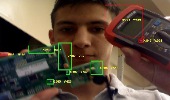 Camera Tracking
Camera Tracking ZigBee
ZigBee Camera Controlled System
Camera Controlled System






Documentation
EE Senior Design Project Proposal
Vision Agenda 2-4-13 Vision Minutes
Vision Agenda 2-11-13 Vision Minutes
Vision Agenda 2-18-13 Vision Minutes
Vision Agenda 2-25-13 Vision Minutes
Vision Agenda 3-4-13 Vision Minutes
Vision Agenda 3-20-13 Vision Minutes
Vision Agenda 3-25-13 Vision Minutes
Vision Agenda 4-3-13 Vision Minutes
Vision Agenda 4-10-13 Vision Minutes
Vision Agenda 4-15-13 Vision Minutes
Vision Agenda 4-22-13 Vision Minutes
Vision Agenda 4-29-13 Vision Minutes
Vision Schematic
Vision Board
Vision Poster
Vision Code
Vision Final Report
Contact Form
Mailing Address
University of Notre Dame
Department of Electrical Engineering275 Fitzpatrick Hall Notre Dame, IN 46556
Phone: 574-631-5480
info@ee.nd.edu